8 ungesichtete Fragmente: Plagiat
| [1.] Ahh/Fragment 055 22 - Diskussion Bearbeitet: 7. January 2018, 21:57 (Hindemith) Erstellt: 7. January 2018, 21:51 Hindemith | Ahh, Fragment, KomplettPlagiat, Rost 2006, SMWFragment, Schutzlevel, ZuSichten |
|
|
|
| Untersuchte Arbeit: Seite: 55, Zeilen: 22-29 |
Quelle: Rost 2006 Seite(n): 17, Zeilen: 5ff |
|---|---|
| Als neuronale Basis der prädiktiven Griffkraftkontrolle werden so genannte interne Modelle postuliert, die sowohl die physikalischen Objekteigenschaften, als auch die dynamischen Systemeigenschaften eines Gegenstandes während einer Bewegung vorhersehen können (Blakemore et al. 2001, Flanagan et al. 2003 u. 1997, Kawato et al. 2003 u. 1999, Nowak et al. 2007). Interne Modelle werden definiert als Repräsentation des motorischen Systems, welches den aktuellen Stand des motorischen Systems und das motorische Kommando nutzt, um den nächsten Zustand zu planen (Miall 1993). | Als neuronale Basis der prädiktiven Griffkraftkontrolle werden so genannte interne Modelle postuliert, die sowohl die physikalischen Objekteigenschaften, als auch dynamischen Systemeigenschaften eines Gegenstandes während einer Bewegung vorhersehen können [7, 24, 26, 64, 65]. Interne Modelle werden definiert als Repräsentation des motorischen Systems, welches den aktuellen Stand des motorischen Systems und das motorische Kommando nutzt, um den nächsten Zustand zu planen [75].
7. Blakemore, S.J., C.D. Frith, and D.M. Wolpert, The cerebellum is involved in predicting the sensory consequences of action. Neuroreport, 2001. 12(9): p. 1879-84. 24. Flanagan, J.R., et al., Prediction precedes control in motor learning. Curr Biol, 2003. 13(2): p. 146-50. 26. Flanagan, J.R. and A.M. Wing, The role of internal models in motion planning and control: evidence from grip force adjustments during movements of hand-held loads. J Neurosci, 1997. 17(4): p. 1519-28. 64. Kawato, M., et al., Internal forward models in the cerebellum: fMRI study on grip force and load force coupling. Prog Brain Res, 2003. 142: p. 171-88. 65. Kawato, M. and D. Wolpert, Internal models for motor control. Novartis Found Symp, 1998. 218: p. 291-304; discussion 304-7. 75. Miall, R.C., et al., Is the Cerebellum a Smith Predictor? J Mot Behav, 1993. 25(3): p. 203-216. |
Ein Verweis auf die Quelle fehlt. Vergleiche auch Fragment 019 21 |
|
| [2.] Ahh/Fragment 019 21 - Diskussion Bearbeitet: 7. January 2018, 21:56 (Hindemith) Erstellt: 7. January 2018, 21:56 Hindemith | Ahh, Fragment, Rost 2006, SMWFragment, Schutzlevel, Verschleierung, ZuSichten |
|
|
|
| Untersuchte Arbeit: Seite: 19, Zeilen: 21-29 |
Quelle: Rost 2006 Seite(n): 17, Zeilen: 5ff |
|---|---|
| Als neuronale Basis der prädiktiven Griffkraftkontrolle werden sogenannte interne Modelle postuliert, die sowohl die physikalischen Objekteigenschaften, als auch die dynamischen Systemeigenschaften während der Bewegung eines Gegenstandes vorhersehen können (Blakemore et al. 2001, Flanagan et al. 2003 u. 1997, Kawato et al. 2003 u. 1999, Nowak et al. 2007). Interne Modelle werden definiert als Repräsentationen des motorischen Systems und der physikalischen Eigenschaften. Sie erfassen den aktuellen Zustand des motorischen Systems und planen dessen Änderung durch eine intendierte Bewegung (Miall 1993). | Als neuronale Basis der prädiktiven Griffkraftkontrolle werden so genannte interne Modelle postuliert, die sowohl die physikalischen Objekteigenschaften, als auch dynamischen Systemeigenschaften eines Gegenstandes während einer Bewegung vorhersehen können [7, 24, 26, 64, 65]. Interne Modelle werden definiert als Repräsentation des motorischen Systems, welches den aktuellen Stand des motorischen Systems und das motorische Kommando nutzt, um den nächsten Zustand zu planen [75].
7. Blakemore, S.J., C.D. Frith, and D.M. Wolpert, The cerebellum is involved in predicting the sensory consequences of action. Neuroreport, 2001. 12(9): p. 1879-84. 24. Flanagan, J.R., et al., Prediction precedes control in motor learning. Curr Biol, 2003. 13(2): p. 146-50. 26. Flanagan, J.R. and A.M. Wing, The role of internal models in motion planning and control: evidence from grip force adjustments during movements of hand-held loads. J Neurosci, 1997. 17(4): p. 1519-28. 64. Kawato, M., et al., Internal forward models in the cerebellum: fMRI study on grip force and load force coupling. Prog Brain Res, 2003. 142: p. 171-88. 65. Kawato, M. and D. Wolpert, Internal models for motor control. Novartis Found Symp, 1998. 218: p. 291-304; discussion 304-7. 75. Miall, R.C., et al., Is the Cerebellum a Smith Predictor? J Mot Behav, 1993. 25(3): p. 203-216. |
Ein Verweis auf die Quelle fehlt. Vergleiche auch Fragment 055 22. |
|
| [3.] Ahh/Fragment 051 01 - Diskussion Bearbeitet: 16. February 2018, 09:48 (Xerendip) Erstellt: 7. January 2018, 22:01 Hindemith | Ahh, Fragment, KomplettPlagiat, Rost 2006, SMWFragment, Schutzlevel, ZuSichten |
|
|
|
| Untersuchte Arbeit: Seite: 51, Zeilen: 1-28 |
Quelle: Rost 2006 Seite(n): 14, 15, Zeilen: 14: letzter Absatz; 15: 1ff |
|---|---|
| Individuelle Defizite der prädiktiven Griffkraftregulierung fanden sich auch bei unilateralen Schädigungen des Kleinhirns. Müller und Dichgans untersuchten Patienten mit unilateralen Kleinhirnschädigungen infolge von arteriellen Infarkten und fanden ähnliche Defizite der Patienten mit zerebellärer Atrophie (Müller und Dichgans 1994a). Allerdings waren Defizite, wie bei der Griffkraft-Last-Koordination, auf die betroffene Körperseite beschränkt (Müller u. Dichgans 1994a). Untersuchungen von Fellows et al. zeigten dass Schädigungen im Bereich der A. cerebelli posterior inferior (PICA) keinen Einfluss auf die Griffkraftkoordination während der Bewegung eines Objektes hatten (Fellows et al. 2001). Hingegen führte eine isolierte Schädigung im Bereich der A. cerebelli superior (SuCA) zu ähnlichen Defiziten der Griffkraftregulierung wie bei Patienten mit zerebellärer Atrophie mit verlangsamter Griffkraftproduktion und erhöhten Griffkraftwerten (Fellows et al. 2001). Durch Infarkt der SuCA kommt es vor allem zu Schädigungen im Bereich des Nucleus dentatus, der wichtigsten Outputstation des Kleinhirns (Tatu et al. 1996). Im Nucleus dentatus werden insbesondere Information der Purkinje-Zellen des zerebellären Kortex verarbeitet (Tatu et al. 1996), welche ebenso durch eine zerebelläre Atrophie in ihrer Funktion beschränkt sind. Robertson und Grimm zeigten schon 1975, dass eine enge Verbindung zwischen Aktivität des Nucleus dentatus und der Ausführung sequenzieller Bewegungen im Affen bestand (Robertson u. Grimm 1975). Läsionen des Nucleus dentatus führten zu einer veränderten Koordination zwischen Hand und Fingermuskulatur (Mason et al. 1998, Milak et al. 1997). Bei Affen zeigte sich eine synchronisierte Aktivität des Antagonisten zum Zeitpunkt einer erwarteten Laständerung beim Halten eines Objektes (Hore u. Vilis 1984). Durch Kühlung des Nucleus dentatus wurde diese Aktivität nicht mehr beobachtet. Dies indizierte eine Beeinträchtigung der prädiktiven Ausführung von motorischen Kommandos in Hinblick auf eine aufkommende Laststörung (Hore u. Vilis 1984). | Individuelle Defizite der prädiktiven Griffkraftregulierung fanden sich auch bei unilateren [sic] Schädigungen des Kleinhirns. Müller und Dichgans untersuchten Patienten mit unilateralen Kleinhirnschädigungen infolge von arteriellen Infarkten und fanden ähnliche Defizite der Patienten mit zerebellärer Atrophie [80]. Allerdings waren Defizite, wie bei der Griffkraft-Last-Koordination auf die betroffene Körperseite beschränkt [80]. Untersuchungen von Fellows et al zeigten dass Schädigungen im Bereich der posterioren inferioren zerebellären Arterie (PICA) keinen Einfluss auf die Griffkraftkoordination während der Bewegung eines Objektes hatten [19]. Hingegen führte eine isolierte Schädigung im Bereich superioren zerebellären Arterie (SUCA) zu ähnlichen
[Seite 15] Defiziten der Griffkraftregulierung wie bei Patienten mit zerebellärer Atrophie mit verlangsamender Griffkraftproduktion und erhöhten Griffkraftwerten [19]. Durch Infarkt der SUCA kommt es vor allem zu Schädigungen im Bereich des Nucleus dentatus, der wichtigsten Outputstation des Kleinhirns [105]. Im Nucleus dentatus werden insbesondere Information der Purkinje Zellen des zerebellären Kortex verarbeitet [105], welche ebenso durch eine zerebelläre Atrophie in ihrer Funktion beschränkt sind. Robertson und Grimm zeigten schon 1975, dass eine enge Verbindung zwischen Aktivität des Nucleus dentatus und der Ausführung sequenzieller Bewegungen im Affen bestand [97]. Läsionen des Nucleus dentatus führten zu einer veränderten Koordination zwischen Hand und Fingermuskulatur [73, 77]. Hore und Vilis zeigten bei Affen eine synchronisierte Aktivität des Antagonisten zum Zeitpunkt einer erwarteten Laständerung beim Halten eines Objektes [40]. Durch Kühlung des Nucleus dentatus wurde diese Aktivität nicht mehr beobachtet [40]. Dies indizierte eine Beeinträchtigung der prädiktiven Ausführung von motorischen Kommandos in Hinblick auf eine aufkommende Laststörung [40]. 19. Fellows, S.J., et al., Precision grip deficits in cerebellar disorders in man. Clin Neurophysiol, 2001. 112(10): p. 1793-802. 40. Hore, J. and T. Vilis, A cerebellar-dependent efference copy mechanism for generating appropriate muscle responses to limb pertubations., in Cerebellar functions, J.R. Bloedel, J.D. Dichgans, and W. Precht, Editors. 1984, Springer Verlag: Berlin. p. 24-35. 73. Mason, C.R., et al., Organization of reaching and grasping movements in the primate cerebellar nuclei as revealed by focal muscimol inactivations. J Neurophysiol, 1998. 79(2): p. 537-54. 77. Milak, M.S., et al., Effects of inactivating individual cerebellar nuclei on the performance and retention of an operantly conditioned forelimb movement. J Neurophysiol, 1997. 78(2): p. 939-59. 80. Muller, F. and J. Dichgans, Impairments of precision grip in two patients with acute unilateral cerebellar lesions: a simple parametric test for clinical use. Neuropsychologia, 1994. 32(2): p. 265-9. 97. Robertson, L.T. and R.J. Grimm, Responses of primate dentate neurons to different trajectories of the limb. Exp Brain Res, 1975. 23(5): p. 447-62. 105. Tatu, L., et al., Arterial territories of human brain: brainstem and cerebellum. Neurology, 1996. 47(5): p. 1125-35. |
Ein Verweis auf die Quelle fehlt. |
|
| [4.] Ahh/Fragment 050 15 - Diskussion Bearbeitet: 7. January 2018, 22:08 (Hindemith) Erstellt: 7. January 2018, 22:08 Hindemith | Ahh, Fragment, Rost 2006, SMWFragment, Schutzlevel, Verschleierung, ZuSichten |
|
|
|
| Untersuchte Arbeit: Seite: 50, Zeilen: 15-24 |
Quelle: Rost 2006 Seite(n): 14, Zeilen: 12ff |
|---|---|
| Müller und Dichgans (1994) fanden bei Patienten mit zerebellärer Atrophie verlängerte Zeitintervalle zwischen Griffkraftanstieg und Abheben des Gegenstandes, unregelmäßige Griffkraftverläufe sowie verminderte Griffkraftamplituden (Müller und Dichgans 1994). Auch Fellows et al. fanden, wenn Patienten mit Kleinhirnschädigungen ein Objekt anhoben, ein Defizit der zeitlichen Koordination der proximalen Armmuskulatur und der Fingerkräfte (Fellows et al. 2001). Im Gegensatz zu den Ergebnissen von Müller und Dichgans, fanden Fellows et al. jedoch bei Patienten mit zerebellärer Atrophie erhöhte Griffkraftamplituden. Unbeeinträchtigt zeigte sich auch das Antwortverhalten der Griffkraft auf plötzliche Laständerungen. | Die Griffkraftkontrolle während dem Ergreifen, Heben und Halten eines Objektes bei Patienten mit zerebellärer Atrophie wurde von Müller und Dichgans untersucht [79]. Patienten zeigten verlängerte Zeitintervalle zwischen Griffkraftanstieg und dem Abheben des Gegenstandes, unregelmäßige Griffkraftverläufe sowie verminderte Griffkraftamplituden [79]. Auch Fellows et al. fanden ein Defizit der zeitlichen Koordination der proximalen Armmuskulatur und den Fingerkräften, wenn Patienten mit Kleinhirnschädigungen ein Objekt anhoben [19]. Im Gegensatz zu den Ergebnissen von Müller und Dichgans [79], fanden Fellows et al. erhöhte Griffkraftamplituden bei Patienten mit zerebellärer Atrophie. Unbeeinträchtigt zeigte sich auch das Antwortverhalten der Griffkraft auf plötzliche Laständerungen.
19. Fellows, S.J., et al., Precision grip deficits in cerebellar disorders in man. Clin Neurophysiol, 2001. 112(10): p. 1793-802. 79. Müller, D.J., Dyscoordination of pinch and lift forces during grasp in patients with cerebellar lesions. Experimental Brain Research, 1994. 101: p. 485-492. |
Ein Verweis auf die Quelle fehlt. |
|
| [5.] Ahh/Fragment 009 17 - Diskussion Bearbeitet: 4. April 2018, 20:53 (Xerendip) Erstellt: 4. April 2018, 20:17 Xerendip | Ahh, Buhmann 2005, Fragment, SMWFragment, Schutzlevel, Verschleierung, ZuSichten |
|
|
|
| Untersuchte Arbeit: Seite: 9, Zeilen: 17-29 |
Quelle: Buhmann 2005 Seite(n): 14, Zeilen: 23-33 |
|---|---|
| Wird ein Gegenstand in der Hand gehalten, müssen die Fingerkräfte exakt kontrolliert werden, zum Beispiel muss ein „rutschiger“ Gegenstand mit erhöhter Kraft zwischen den Fingerkuppen gehalten werden, damit er nicht aus der Hand gleitet. So erfordert etwa feuchte Seife eine höhere Griffkraft als eine trockene. Die Objekteigenschaften wie Gewicht und Oberflächenreibung stellen bestimmte Anforderungen an die Höhe der Griffkraft, die notwendig ist, um ein Herunterfallen des Gegenstandes zu verhindern (Flanagan u. Johansson, 2002). Andererseits sollten die Fingerkräfte bei der Objektmanipulation vor allem bei zerbrechlichen Gegenständen nicht übermäßig hoch sein, um eine Schädigung oder Zerstörung des Gegenstandes zu vermeiden. Die exakte Abstimmung der Griffkraft begünstigt die Beweglichkeit der Finger und damit die Feinmanipulation von Objekten. | Wird ein Gegenstand in der Hand gehalten, müssen die Fingerkräfte exakt kontrolliert werden, z.B. muss ein „rutschiger“ Gegenstand mit erhöhter Kraft zwischen den Fingerkuppen gehalten werden um ein Gleiten des Objektes aus der Hand zu verhindern. [...] Beim Hantieren mit feuchter Seife muss eine höhere Griffkraft aufgebracht werden, als beim Halten einer wesentlich griffigeren trockenen Seife. Andererseits sollten die Fingerkräfte bei der Objektmanipulation vor allem bei zerbrechlichen Gegenständen nicht übermäßig hoch sein. Die exakte Regulation der Griffkraft begünstigt die Beweglichkeit der Finger und damit die präzise Manipulation von Objekten. |
Kein Hinweis auf die Quelle. |
|
| [6.] Ahh/Fragment 010 01 - Diskussion Bearbeitet: 4. April 2018, 20:48 (Xerendip) Erstellt: 4. April 2018, 20:43 Xerendip | Ahh, Buhmann 2005, Fragment, SMWFragment, Schutzlevel, Verschleierung, ZuSichten |
|
|
|
| Untersuchte Arbeit: Seite: 10, Zeilen: 1 ff. (ganze Seite) |
Quelle: Buhmann 2005 Seite(n): 15, Zeilen: 6-14 |
|---|---|
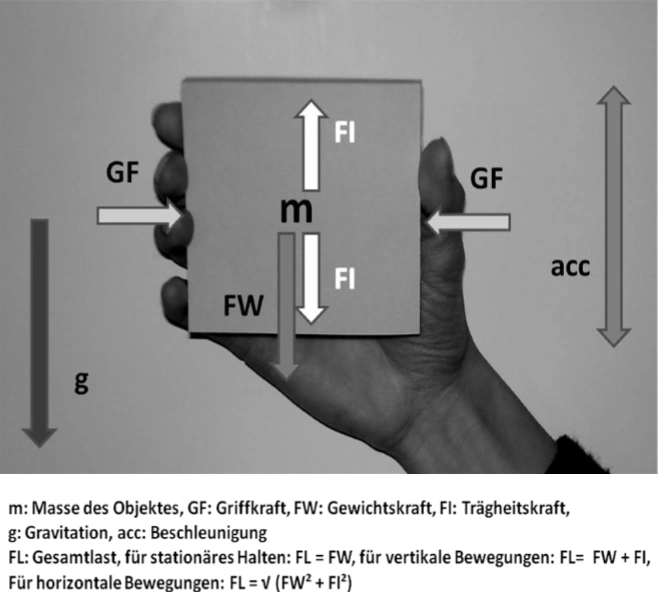
| Die Kraft, die tangential zur Oberfläche des Gegenstandes wirkt, ist eine Resultierende aus den Komponenten Gewichtskraft und Trägheitskraft, proportional zur Beschleunigung des Objektes (siehe Abb. 1).
Abbildung 1: Darstellung der physikalischen Kräfte, die während der Manipulation eines in der Hand gehaltenen Gegenstandes auftreten, am Beispiel vertikaler Armbewegungen entlang der Längsachse des Objektes. Die Gesamtlast (FL) muss durch eine adäquate Griffkraft (GF) kompensiert werden, um ein Gleiten des Objekts aus der Hand zu verhindern. Die Gesamtlast (FL) ist für statisches Halten, vertikale und horizontale Bewegungen unterschiedlich zu berechnen. |
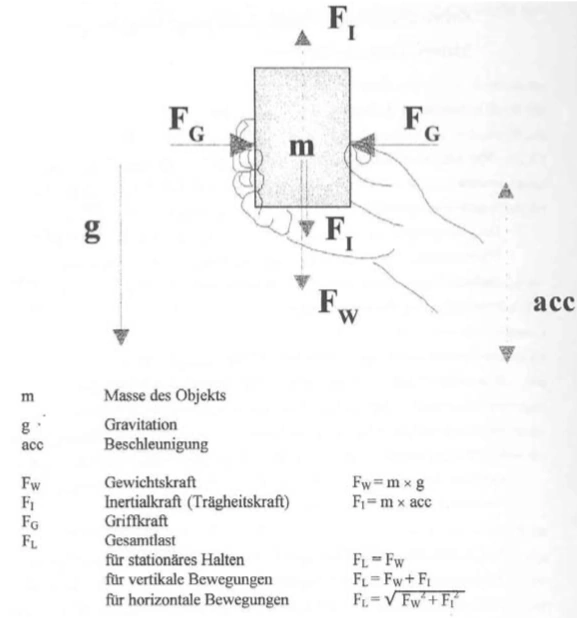
Die Kraft, die tangential zur Oberfläche des Gegenstandes wirkt, ist nun eine Kombination aus den Komponenten Gewichtskraft und Trägheitskraft, proportional zur Beschleunigung des Objektes (siehe Abbildung 1)
Abbildung 1: Darstellung der physikalischen Kräfte, die während der Manipulation eines in der Hand gehaltenen Gegenstandes auftreten, am Beispiel vertikaler Armbewegungen entlang der Längsachse des Objektes. Die Gesamtlast (FL) muss durch eine adäquate Griffkraft (FG) kompensiert werden, um ein Gleiten des Objekts aus der Hand zu verhindern. Die Gesamtlast (FL) ist für statisches Halten, vertikale und horizontale Bewegungen unterschiedlich zu berechnen. |
Kein Hinweis auf die Quelle. |
|
| [7.] Ahh/Fragment 011 01 - Diskussion Bearbeitet: 4. April 2018, 21:04 (Xerendip) Erstellt: 4. April 2018, 21:00 Xerendip | Ahh, Buhmann 2005, Fragment, SMWFragment, Schutzlevel, Verschleierung, ZuSichten |
|
|
|
| Untersuchte Arbeit: Seite: 11, Zeilen: 1 ff. (ganze Seite) |
Quelle: Buhmann 2005 Seite(n): 15-16, Zeilen: 15: 15 ff.; 16: 1 ff. |
|---|---|
| 1.2 Griffkraftsteuerung
Johansson und Westling untersuchten das Heben, Halten und Absetzen eines zwischen Daumen und Zeigefinger, im sog. Präzisionsgriff, gehaltenen Testobjektes (Johansson u. Westling, 1984). Dabei konnten sie zwischen sieben Phasen differenzieren (Abb.2). Zunächst werden die Finger bis zur Berührung an das Objekt herangeführt. In der ersten Phase (a) wird die Griffkraft sukzessive erhöht (preloading) und anschließend steigt in einer zweiten Phase (b) die Hebekraft parallel zur Griffkraft an (loading). In dieser Phase wird das Objekt entsprechend der an den Griffflächen wirkenden Hebekraft nach oben gezogen. Übersteigt die Hebekraft nach oben die Gewichtskraft (c), hebt das Objekt von der Unterlage ab (transitional phase). Während das Objekt in der gewünschten Position gehalten wird (d), ist die Griffkraft nahezu konstant (static phase). Nach dem Rücktransport (e) des Objektes zur Unterlage (replacement) ohne wesentliche Kraftänderungen und nach einer Verzögerung (f) wird (Phase g) die Griffkraft entsprechend der Abnahme der Hebekraft gesenkt (unloading), und die Versuchsperson löst den Präzisionsgriff. Die Koordination zwischen Griffkraft und Hebekraft bzw. Gesamtlast kann als Relation zwischen den beiden Kräften dargestellt werden (Abbildung 2b). Um ein Rutschen des Objektes zu verhindern, muss das Verhältnis zwischen Griffkraft und Gesamtlast das minimal notwendige Verhältnis (slip ratio) zwischen den beiden Kräften, das durch den Reibungskoeffizienten zwischen Objektoberfläche und Haut bestimmt wird, übersteigen. Zur Bestimmung der slip ratio wurden die Versuchspersonen aufgefordert, den Griff zu lockern und das Testobjekt aus der Hand rutschen zu lassen. Die slip ratio wird durch die Griffkraft bestimmt, die am Objekt wirkt, wenn dieses eben zu rutschen beginnt. Die Differenz zwischen der tatsächlich aufgebrachten Griffkraft und der slip ratio repräsentiert eine „Sicherheitsmarge“ (safety margin) zur Vermeidung von Rutschbewegungen bei der Objektmanipulation z.B. durch Ermüdung der Fingerkräfte oder Änderung des Reibungskoeffizienten durch Schwitzen (Abb. 2b). |
[Seite 15]
1.3.2 Abstimmung der Kräfte bei Heben und Halten eines Objektes Johansson and Westling untersuchten das Anheben, Halten und Absetzen eines zwischen Daumen und Zeigefinger, im so genannten Präzisionsgriff, gehalten [sic] Testobjektes (Johansson and Westling, 1984). Dabei konnten sie zwischen sieben Phasen differenzieren (Abb.2). Zunächst werden die Finger bis zur Berührung an das Objekt herangeführt. In der ersten [Seite 16] Phase(a) wird die Griffkraft sukzessive erhöht (preloading) und anschließend steigt in einer zweiten Phase (b) die Hebekraft parallel zur Griffkraft an (loading) In dieser Phase wird das Objekt entsprechend der an den Griffflächen wirkenden Hubkraft nach oben gezogen. Übersteigt die Hubkraft nach oben die Gewichtskraft (c), hebt das Objekt von der Unterlage ab (transitional phase). Während das Objekt in der gewünschten Position gehalten wird (d), ist die Griffkraft nahezu konstant (static phase). Nach dem Rücktransport des Objektes zur Unterlage (replacement) ohne wesentliche Kraftänderungen und einer Verzögerung (f) ändert sich die Griffkraft wiederum parallel zur Hubkraft (g). Die Griffkraft wird gesenkt (unloading) und die Versuchsperson löst den Präzisionsgriff. Die Koordination zwischen Griffkraft und Hubkraft bzw. Gesamtlast kann als Relation zwischen den beiden Kräften dargestellt werden (Abbildung 2b). Um ein Rutschen des Objektes zu verhindern, muss das Verhältnis zwischen Griffkraft und Gesamtlast, das minimal notwendige Verhältnis (slip ratio) zwischen den beiden Kräften, das durch den Reibungskoeffizienten zwischen Objektoberfläche und Haut bestimmt wird, übersteigen. Zur Bestimmung der slip ratio wurden die Versuchspersonen aufgefordert den Griff zu lockern und das Testobjekt aus der Hand rutschen zu lassen. Die slip ratio wird durch die Griffkraft bestimmt, bei der das Objekt wirkt [sic], wenn dieses eben zu rutschen beginnt. Die Differenz zwischen der tatsächlich aufgebrachten Griffkraft und der slip ratio repräsentiert eine „Sicherheitsmarge“ (safety margin) zur Vermeidung von Rutschbewegungen bei der Objektmanipulation z.B. durch Ermüdung der Fingerkräfte oder Änderung des Reibungskoeffizienten durch Schwitzen. |
Kein Hinweis auf die Quelle. |
|
| [8.] Ahh/Fragment 012 01 - Diskussion Bearbeitet: 4. April 2018, 21:35 (Xerendip) Erstellt: 4. April 2018, 21:18 Xerendip | Ahh, Buhmann 2005, Fragment, KomplettPlagiat, SMWFragment, Schutzlevel, ZuSichten |
|
|
|
| Untersuchte Arbeit: Seite: 12, Zeilen: 1-10 |
Quelle: Buhmann 2005 Seite(n): 17, Zeilen: 1-6 |
|---|---|
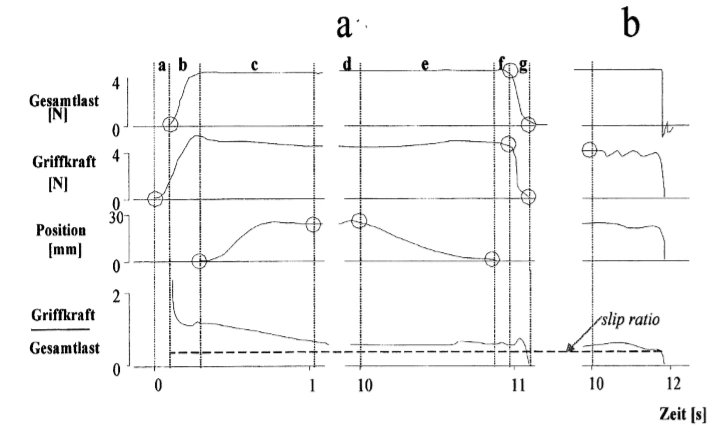
'Abbildung 2: a) Gesamtlast (Hebekraft), Griffkraft, vertikale Position und Verhältnis zwischen Griffkraft und Gesamtlast eines einzelnen Hebeversuchs (Objektgewicht: 400 g; Oberflächenstruktur: Sandpapier). Erläuterungen zu den sieben Phasen a – g im Text. b) Bestimmung der minimalen Griffkraft (slip force). Die vertikale gepunktete Linie kennzeichnet den Beginn der willentlichen Kraftreduktion. Die minimale Differenz zwischen Griffkraft und Gesamtlast (slip ratio) ist abhängig vom Reibungskoeffizienten zwischen Objektoberfläche und Haut. Modifiziert nach Johansson et al. (1984). |
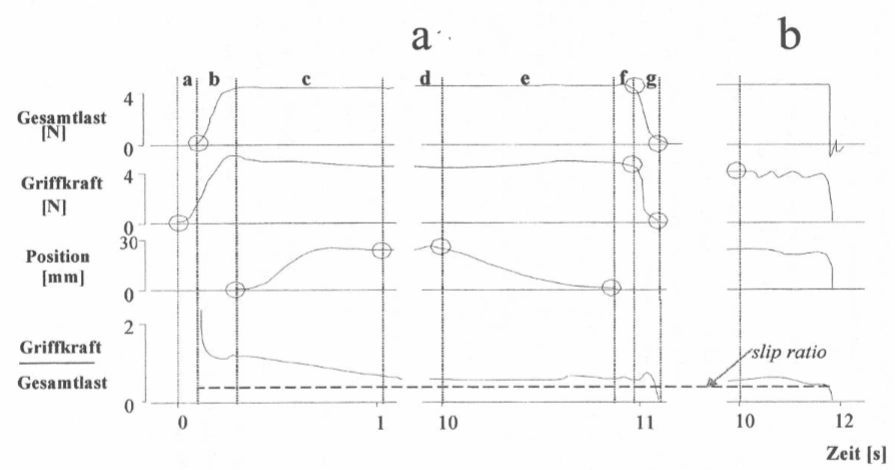
Abbildung 2: a) Gesamtlast (Hubkraft), Griffkraft, vertikale Position und Verhältnis zwischen Griffkraft und Gesamtlast eines einzelnen Hebeversuchs (Objektgewicht: 400g; Oberflächenstruktur: Sandpapier). Erläuterungen zu den sieben Phasen a – g im Text. b) Bestimmung der minimalen Griffkraft (slip force). Die vertikale gepunktete Linie kennzeichnet den Beginn der willentlichen Kraftreduktion. Die minimale Differenz zwischen Griffkraft und Gesamtlast (slip ratio) ist abhängig vom Reibungskoeffizienten zwischen Objektfläche [sic] und Haut. Modifiziert nach Johansson et al. (1994). |
Kein Hinweis auf die Quelle. |
|